При вивченні обертального руху зручніше характеризувати його не лінійними параметрами (шлях, швидкість, лінійне прискорення), а кутовими: кутом повороту, кутовою швидкістю, кутовим прискоренням. Зручність зумовлена тим, що для різних точок тіла кутові характеристики однакові на відміну від лінійних.
Дамо означення кутовим характеристикам обертального руху.
Кут повороту φ – це кут, на який повертається радіус-вектор будь-якої точки тіла. Вимірюється в радіанах. Довжина дуги (шлях S) зв’язана з кутом повороту (кутовою координатою) через радіус: S=φ٠R.
Кутова швидкість ω - це границя відношення кута повороту ∆φ до проміжку часу ∆t, за який цей поворот здійснений, при умові, що ∆t зменшується до нуля, тобто перша похідна від кута повороту за часом:
 .
.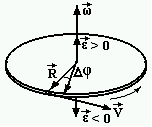
Кут повороту є величина псевдоскалярна, так як його знак змінюється при переході від правої системи координат до лівої. Тому кутову швидкість прийнято вважати вектором (рис.), направленим вздовж осі обертання у відповідності з правилом правого гвинта: якщо обертати гвинт з правою різьбою разом з тілом, то поступальний рух гвинта вкаже напрямок вектора кутової швидкості. З кінця цього вектора обертання тіла видно проти годинникової стрілки. Вимірюється кутова швидкість в рад/с.
Встановимо зв’язок між кутовою та лінійною швидкостями:

Вектори v, ω i R, як видно із рис., взаємно-перпендикулярні. Тому рівняння для швидкості записують у векторній формі через векторний добуток:  .
.

Кутове прискорення – це границя відношення зміни кутової швидкості до проміжку часу ∆t, за який ця зміна відбулася, при умові, що ∆t → 0, тобто це перша похідна від кутової швидкості за часом: .
Так як вектор ω направлений по осі обертання, то і вектор Δω, а отже і вектор кутового прискорення ε теж направлений вздовж закріпленої осі обертання. У випадку прискореного руху він співпадає з напрямком кутової швидкості і протилежний їй при сповільненому русі. Вимірюється кутове прискорення в рад/с2.
Встановимо зв’язок між лінійним та кутовим прискореннями:

Тут  ,
,  – відомі нам дотичне і нормальне прискорення.
– відомі нам дотичне і нормальне прискорення.
Період обертання:  .
.
Деякі мікроорганізми вже давно навчились використовувати закони обертального руху. Прикладом може бути рухомий пристрій Escherichia colі: